Databehandling av linjär Algebra: Cyborg styrning
1 year ago
170
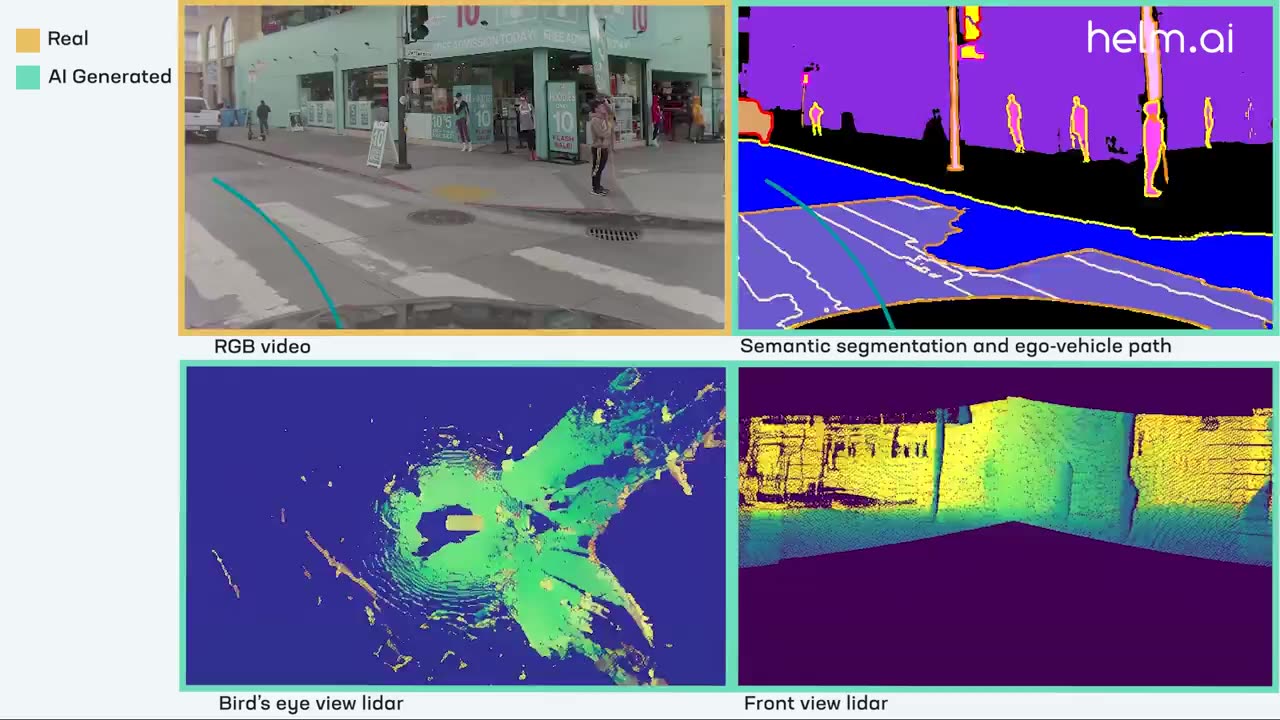
Meet WorldGen-1, our multi-sensor generative AI model for simulating the entire autonomous vehicle stack! 🌎 Check out AI-generated digital siblings of driving scenes across multiple sensor types and camera perspectives, created from simple prompts. https://t.co/UH1kYSymY2
Loading comments...
-
 LIVE
LIVE
JuicyJohns
5 hours ago🟢#1 REBIRTH PLAYER 10.2+ KD🟢
24 watching -
 45:33
45:33
The White House
3 hours agoPress Secretary Karoline Leavitt Briefs Members of the Media, Sep. 22, 2025
2.91K6 -
 1:05:07
1:05:07
Timcast
2 hours agoTrump Orders DOJ Bondi To Prosecute Democrats In Public Statement
141K68 -
 2:15:20
2:15:20
Steven Crowder
4 hours agoCharlie Kirk Conspiracies Spread Like Wildfire: What's Really Going On?
452K555 -
 LIVE
LIVE
Nerdrotic
6 hours ago $0.94 earnedStar Wars: Mandalorian and Grogu Trailer Reaction - Nerdrotic Nooner 518
505 watching -
 LIVE
LIVE
Rebel News
1 hour agoOstrich cull imminent, Rebel on the ground | Rebel Roundup
549 watching -
 1:04:57
1:04:57
The Rubin Report
3 hours agoCrowd Stunned by Trump’s Brutally Honest Remark at Charlie Kirk’s Funeral
66.9K43 -
 1:00:19
1:00:19
Grant Stinchfield
2 hours ago $1.13 earnedThe Exploitation of Charlie Kirk's Death is Very Real
14.5K18 -
 1:40:13
1:40:13
Nikko Ortiz
3 hours agoJapan's Prison System Is CRAZY...
35.6K3 -
 1:43:37
1:43:37
The Mel K Show
3 hours agoMORNINGS WITH MEL K Globalist Descend on America: Is it Time to Pull the Plug? 9-22-25
27.5K8