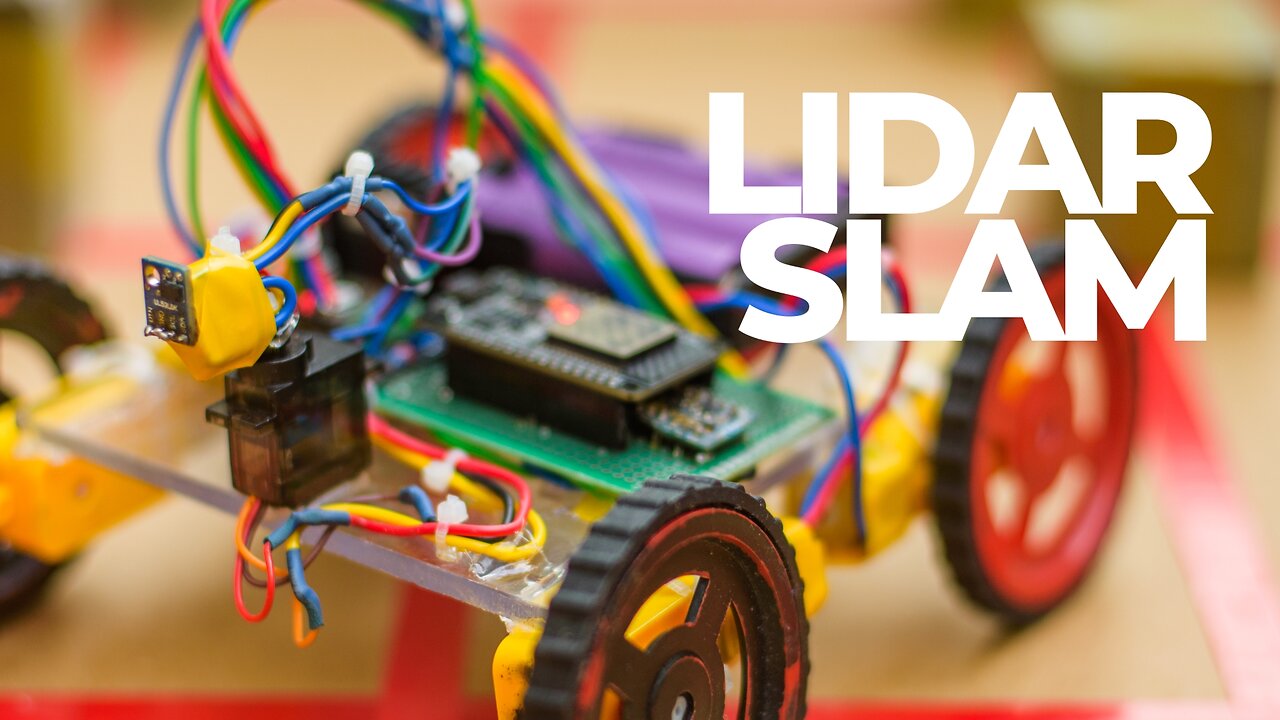
DIY LiDAR SLAM Robot from Scratch – No Libraries, No Simulations! Witness the Future of Robotics!
Embark on a groundbreaking journey into the world of SLAM (Simultaneous Localization and Mapping) as we unveil a DIY LiDAR-based SLAM system—built entirely from scratch! In this deep-dive documentary, we take you through the creation of a custom robotic car equipped with a handmade LiDAR sensor using a Time-of-Flight laser and a servo motor. From coding the entire SLAM architecture in pure Python to visualizing it with OpenCV, this project demonstrates what’s possible when you push boundaries and go beyond existing libraries.
No shortcuts. No pre-made toolkits. Just raw innovation and deep technical exploration!
We faced real-world data challenges head-on, employing particle filters, noise reduction techniques, and advanced probabilistic methods to refine our sensor data. But that’s not all—we took things to the next level by integrating AI-driven calibration to maximize accuracy and performance. This wasn't just a SLAM experiment; it was a complete robotics system, culminating in the porting of our Python project into ROS2, bringing together the power of Python and the flexibility of Robot Operating System.
In this video, you'll see the A pathfinding algorithm* in action, powered by our own custom-built library: Vagabond! 🚀 Vagabond simplifies the complexities of pathfinding, allowing users to define environments, set start and end points, and watch as the A* algorithm efficiently navigates through it all. Whether you're into robotics, AI, or game development, this library offers endless possibilities!
Highlights of the Project:
1. Handcrafted LiDAR Sensor: Created using a servo and Time-of-Flight sensor.
2. Pure Python SLAM: No pre-built libraries, everything coded from scratch.
3. Noise Reduction & AI Calibration: Smarter, more accurate SLAM data.
4. Vagabond Pathfinding: Unlock powerful algorithms like A* and Dijkstra's with ease.
5. Seamless Integration with ROS2: Bringing SLAM to life with real-time data visualization in RViz.
6. Dynamic Pathfinding & Navigation: Watch the robot adjust to real-time changes and navigate like a pro.
Ready to dive into the future of DIY Robotics? This is not your ordinary SLAM tutorial. We’re pushing the limits of what’s possible in robotics and automation—and it’s time for you to join us on this journey!
Be sure to check out and use Vagabond, our open-source pathfinding library that makes integrating algorithms like A* and Dijkstra's a breeze in your own projects:
https://github.com/Kawai-Senpai/Vagabond
#Robotics #SLAM #LiDAR #DIYRobot #AI #PythonProgramming #Pathfinding #OpenCV #ROS2 #AstarAlgorithm #Automation #TechInnovation #VagabondLibrary
-
 1:42:41
1:42:41
Glenn Greenwald
7 hours agoReaction to Trump's Primetime Speech; Coldplay "Adultery" Couple Reappears for More Shame; Australia and the UK Obey Israel's Censorship Demands | SYSTEM UPDATE #560
116K75 -
 2:46:41
2:46:41
Barry Cunningham
5 hours agoBREAKING NEWS: President Trump Signs The National Defense Authorization Act | More News!
41.2K27 -
 43:10
43:10
Donald Trump Jr.
7 hours agoThe Days of Destructive DEI are Over, Plus Full News Coverage! | TRIGGERED Ep.301
107K67 -
 52:07
52:07
BonginoReport
6 hours agoThe Internet Picks Bongino’s FBI Replacement - Nightly Scroll w/ Hayley Caronia (Ep.200)
103K66 -
 55:30
55:30
Russell Brand
8 hours agoStay Free LIVE from AmFest — Turning Point USA - SF665
130K14 -
 1:11:26
1:11:26
Kim Iversen
9 hours agoTrump Pulls War Fake-Out…Attack on Venezuela Still Coming!?
85.2K102 -
 2:04:53
2:04:53
Redacted News
7 hours agoPutin just changed EVERYTHING with this move and NATO can't do anything | Redacted w Clayton Morris
177K139 -
 25:22
25:22
DeVory Darkins
7 hours agoTrump scores MAJOR WIN after Inflation Report as his speech sparks EPIC MELTDOWN
58.6K59 -
 1:01:23
1:01:23
Nick Freitas
9 hours agoLIVE at America Fest!
72.4K3 -
 1:11:19
1:11:19
vivafrei
9 hours agoCandace Owens' Backtracks? Brown University Cover-Up? Bongino Leaves! Pfizer Makes LEGAL ADMISSIONS?
151K81