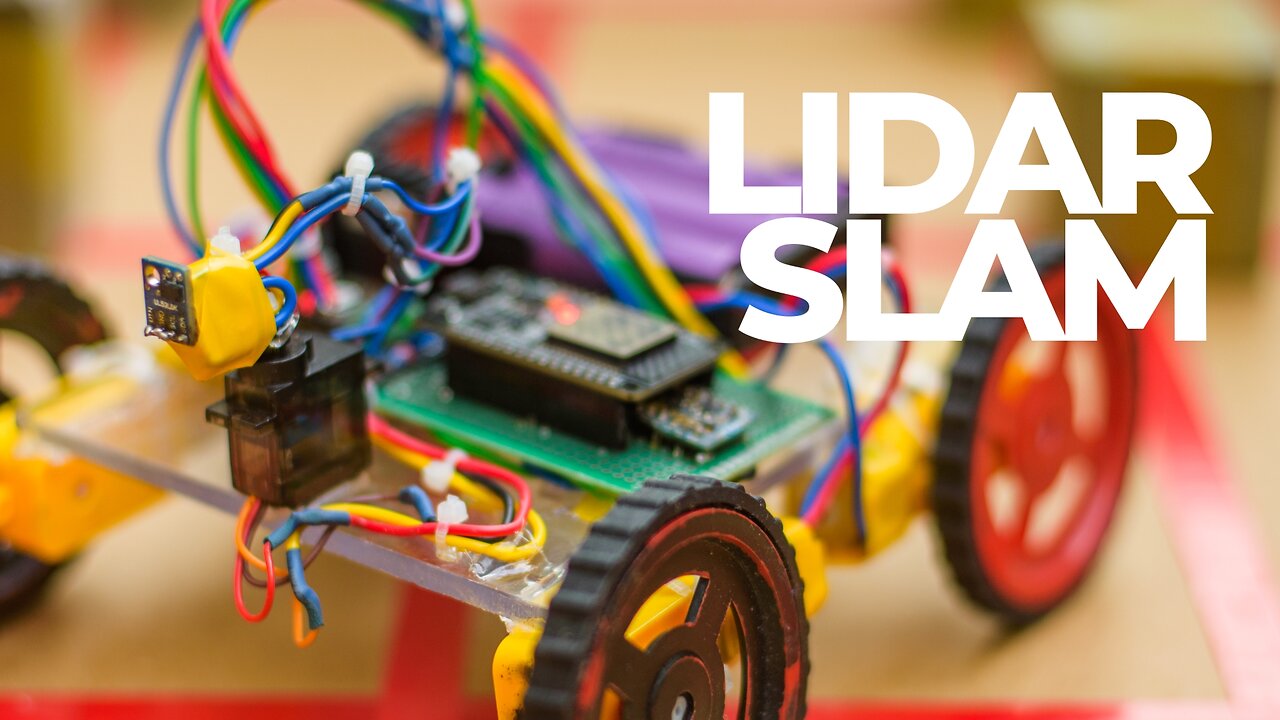
DIY LiDAR SLAM Robot from Scratch – No Libraries, No Simulations! Witness the Future of Robotics!
Embark on a groundbreaking journey into the world of SLAM (Simultaneous Localization and Mapping) as we unveil a DIY LiDAR-based SLAM system—built entirely from scratch! In this deep-dive documentary, we take you through the creation of a custom robotic car equipped with a handmade LiDAR sensor using a Time-of-Flight laser and a servo motor. From coding the entire SLAM architecture in pure Python to visualizing it with OpenCV, this project demonstrates what’s possible when you push boundaries and go beyond existing libraries.
No shortcuts. No pre-made toolkits. Just raw innovation and deep technical exploration!
We faced real-world data challenges head-on, employing particle filters, noise reduction techniques, and advanced probabilistic methods to refine our sensor data. But that’s not all—we took things to the next level by integrating AI-driven calibration to maximize accuracy and performance. This wasn't just a SLAM experiment; it was a complete robotics system, culminating in the porting of our Python project into ROS2, bringing together the power of Python and the flexibility of Robot Operating System.
In this video, you'll see the A pathfinding algorithm* in action, powered by our own custom-built library: Vagabond! 🚀 Vagabond simplifies the complexities of pathfinding, allowing users to define environments, set start and end points, and watch as the A* algorithm efficiently navigates through it all. Whether you're into robotics, AI, or game development, this library offers endless possibilities!
Highlights of the Project:
1. Handcrafted LiDAR Sensor: Created using a servo and Time-of-Flight sensor.
2. Pure Python SLAM: No pre-built libraries, everything coded from scratch.
3. Noise Reduction & AI Calibration: Smarter, more accurate SLAM data.
4. Vagabond Pathfinding: Unlock powerful algorithms like A* and Dijkstra's with ease.
5. Seamless Integration with ROS2: Bringing SLAM to life with real-time data visualization in RViz.
6. Dynamic Pathfinding & Navigation: Watch the robot adjust to real-time changes and navigate like a pro.
Ready to dive into the future of DIY Robotics? This is not your ordinary SLAM tutorial. We’re pushing the limits of what’s possible in robotics and automation—and it’s time for you to join us on this journey!
Be sure to check out and use Vagabond, our open-source pathfinding library that makes integrating algorithms like A* and Dijkstra's a breeze in your own projects:
https://github.com/Kawai-Senpai/Vagabond
#Robotics #SLAM #LiDAR #DIYRobot #AI #PythonProgramming #Pathfinding #OpenCV #ROS2 #AstarAlgorithm #Automation #TechInnovation #VagabondLibrary
-
 LIVE
LIVE
Sarah Westall
2 hours agoBoardroom and Government Infiltration: The Silent Erosion of American Power w/ Mike Harris
201 watching -
 LIVE
LIVE
Mally_Mouse
22 hours ago🎮 Let's Play!!: Stardew Valley pt. 33
208 watching -
 LIVE
LIVE
VapinGamers
1 hour ago $0.20 earnedForlight 84/Fortnite: Rum Bot Testing - Gaming, Coding and Other Things - !rumbot !music
62 watching -
 LIVE
LIVE
OhHiMark1776
3 hours ago🟢 11-21-25 ||||| Two Morrows make a Day-to-Day? ||||| Livestream (2025)
100 watching -
 9:57:30
9:57:30
GrimmHollywood
11 hours ago🔴LIVE • GRIMM HOLLYWOOD x SILVER FOX • GOLDEN YEARS • FINAL DAY • FLARE RACE • ARC RAIDERS •
6.82K4 -
 1:11:24
1:11:24
The Daily Signal
4 hours ago $2.66 earned🚨BREAKING: Democrat Steals $5 Million from FEMA, Trump-Mamdani Meeting Gets Bizarre
10.7K3 -
 1:02:11
1:02:11
BonginoReport
6 hours agoJ.D. Vance Threatens to Kill JD Vance?! - Nightly Scroll w/ Hayley Caronia (Ep.183)
99.9K36 -
 3:09:50
3:09:50
Nerdrotic
17 hours ago $13.74 earnedWarner Bros Fire Sale! | Last Ronin CANNED | WICKED For Good REVIEW - Friday Night Tights 381
42.3K9 -
 2:58:21
2:58:21
Akademiks
3 hours agoMeg Thee Stallion Back LYING again? Offset vs Finesse2x. 6ix9ine house robbed.. HERES WHO DID IT
23.5K -
 LIVE
LIVE
SpartakusLIVE
3 hours agoFriday Night HYPE w/ YOUR King of Content
150 watching